撰写人:胡明栋 版本号及修订时间: v1.0 20250618
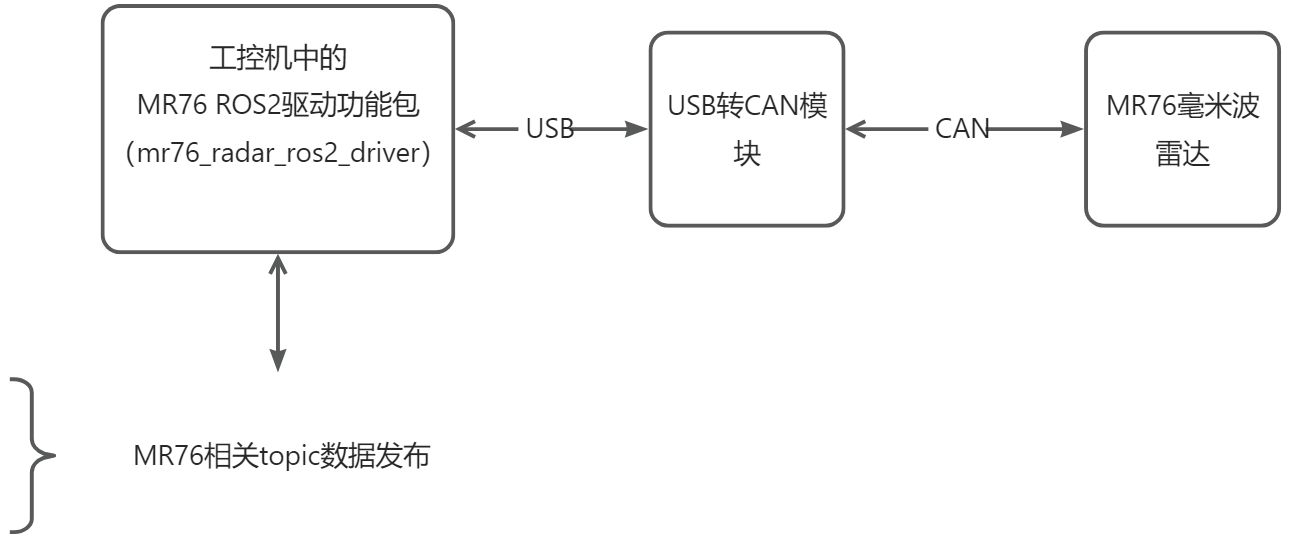
- MR76 毫米波雷达 ROS2 驱动功能包的系统设计思路如下图示。
- ROS2 节点通过 Linux USB 串口驱动应用接口层拿到 USB 转 CAN 模块转发的 MR76 毫米波的 CAN 报文,通过数据处理后转换为相应的 ROS2 话题类型的消息数据,以供 ROS2 应用层其他节点订阅和请求
- 模块型号: 泥人电子的 USB-CAN-V3

- 模块使用手册:CAN转换器系列使用手册V2.5.pdf
- 模块配置软件:CAN配置软件V2.3.9.zip
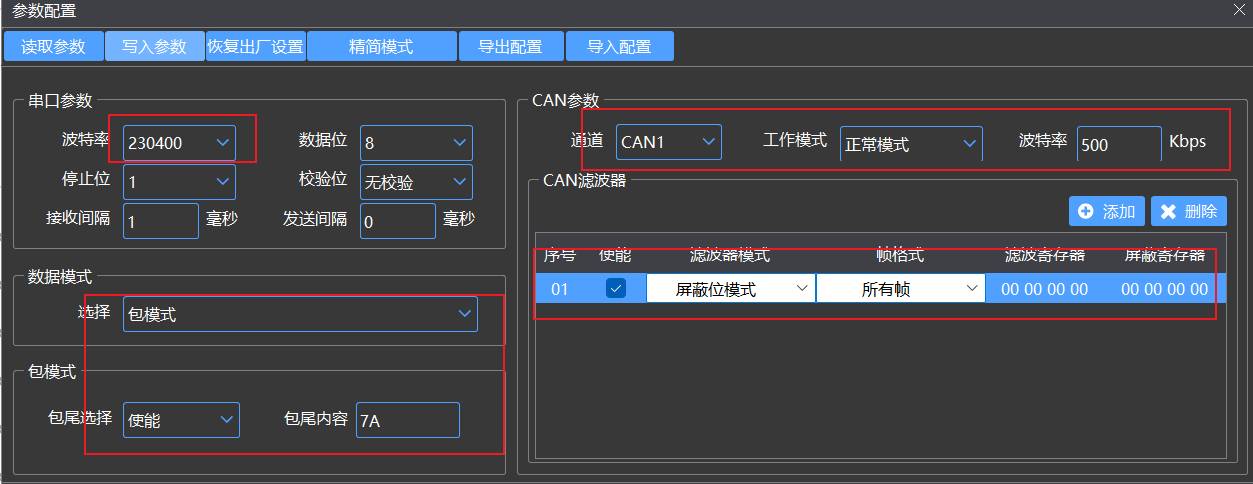
- 模块配置,如下所示:
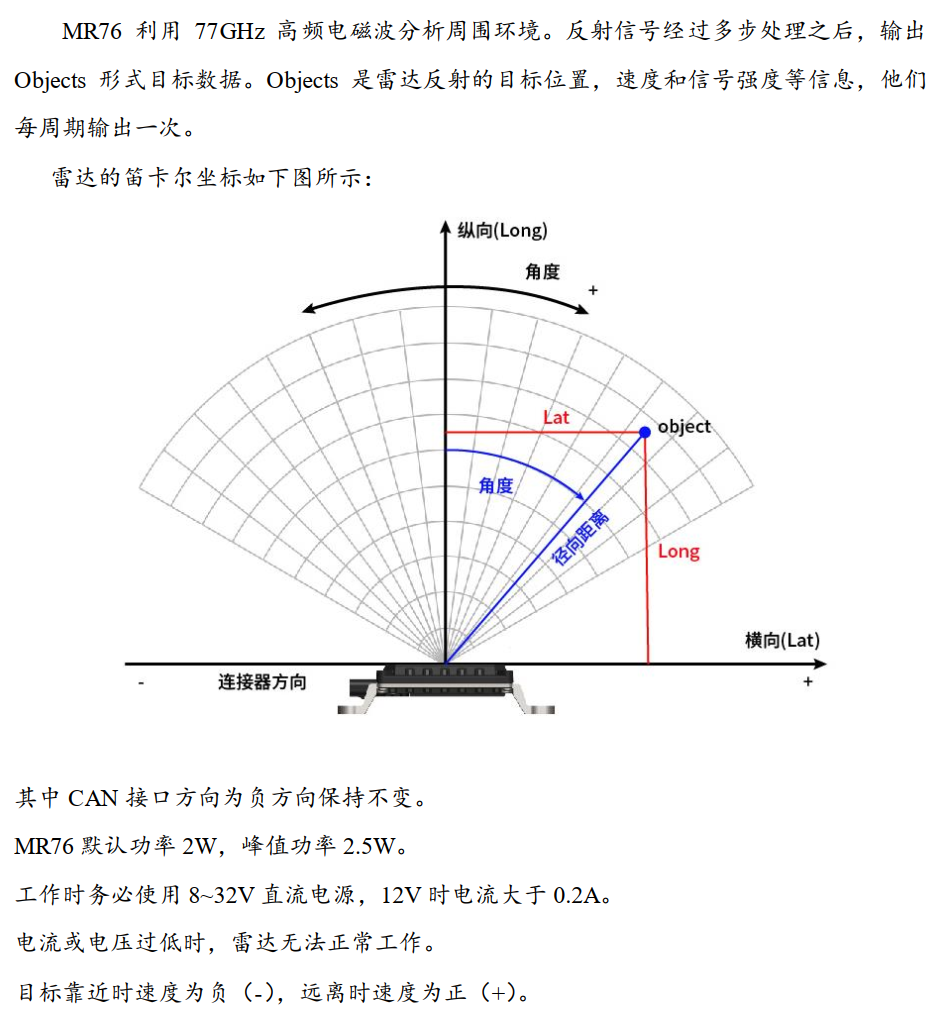
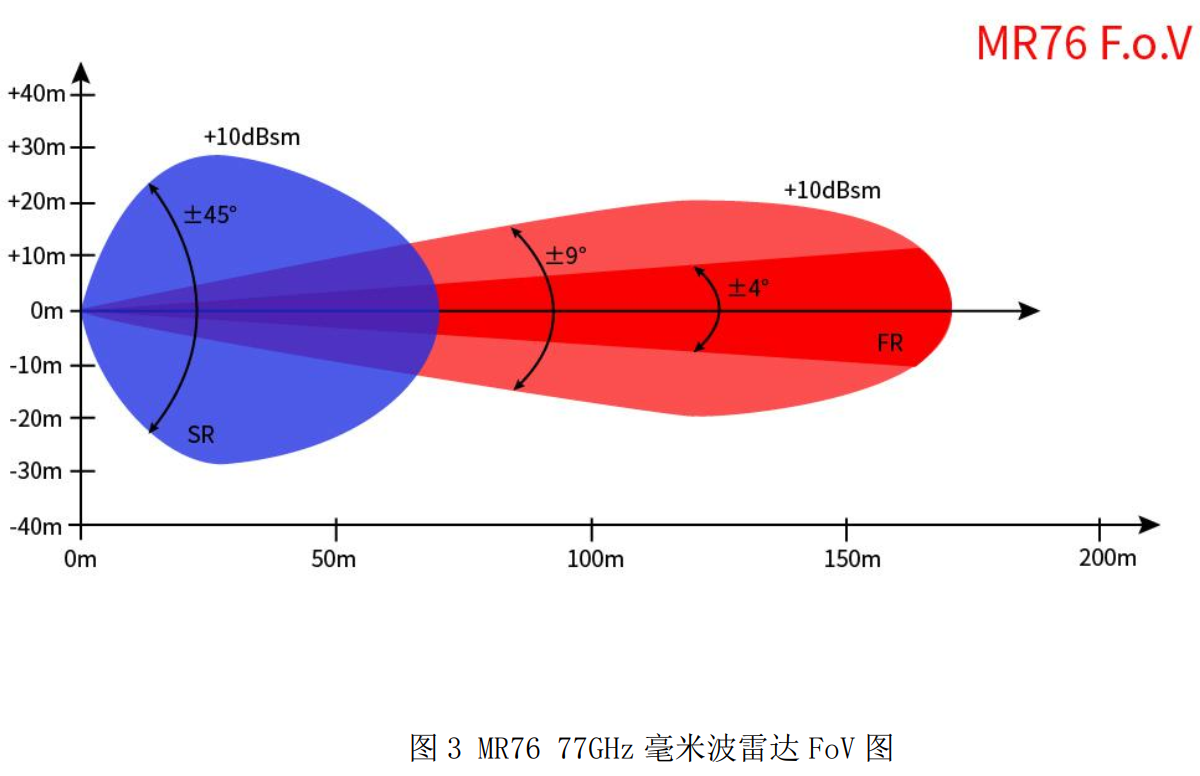
- 串口端数据应用协议:
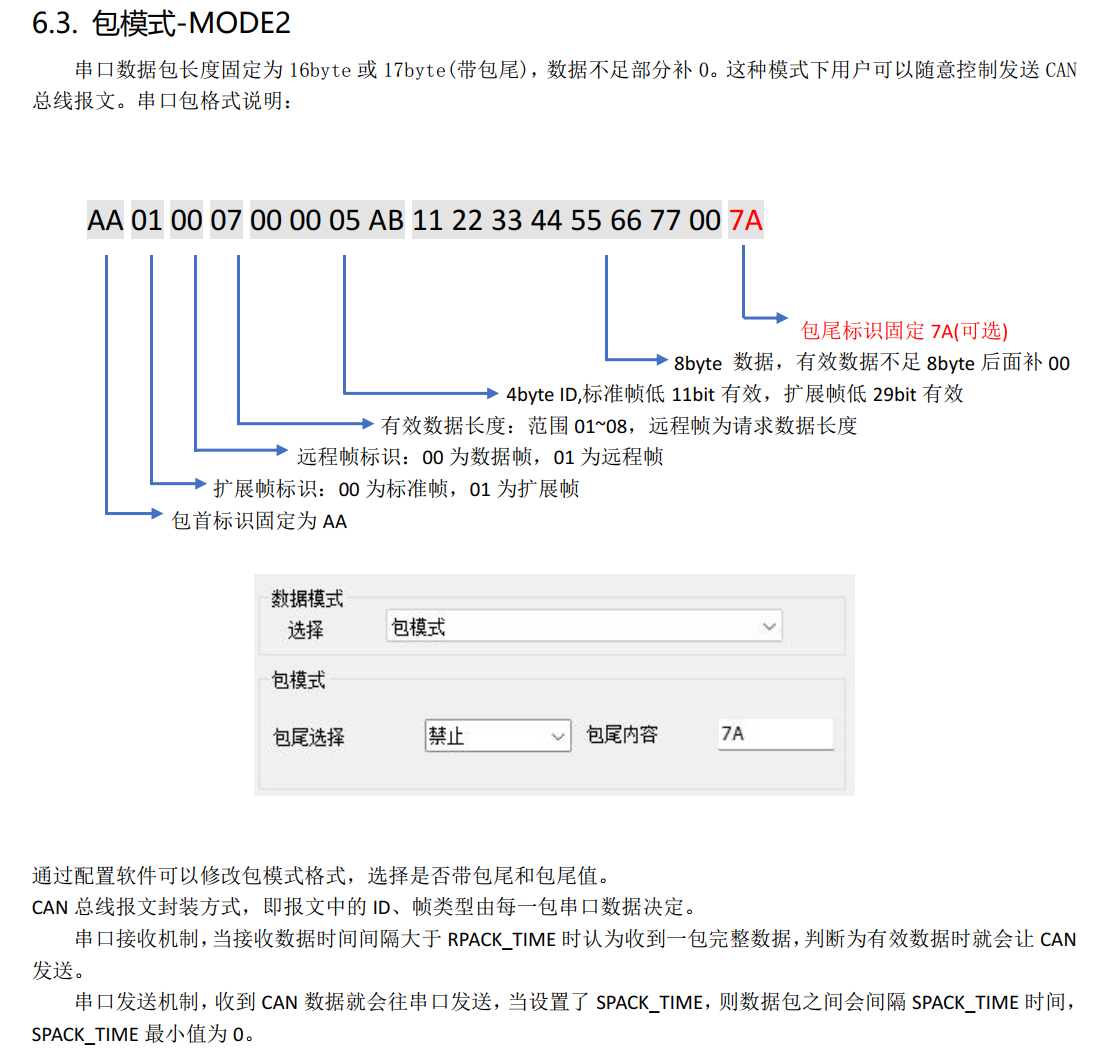
MR76毫米波雷达通信协议V1.2_20200307.pdf
- 安装依赖包
sudo apt-get install ros-<ros2版本>-radar-msgs
sudo apt-get install ros-<ros2版本>-can-msgs
# 以 ros2版本为 Foxy为例
sudo apt-get install ros-foxy-radar-msgs
sudo apt-get install ros-foxy-can-msgs
# galactic
sudo apt-get install ros-galactic-radar-msgs
sudo apt-get install ros-galactic-can-msgs- 组建与运行
colcon build --packages-select mr76_radar_ros2_driver
source install/local_setup.bash
ros2 launch mr76_radar_ros2_driver mr76_radar_ros2_driver.launch.py