![]()
Flexible lightweight finite state machine (FSM) for .NET, supporting shared context for passing parameters, composite (sub) states, command states, lazy-loading and thread safe. The library is AOT friendly, cross-platform and optimized for speed for use in enterprise, robotic/industrial systems, and even tiny (mobile) applications.
The Lite State Machine is designed for vertical scaling. Meaning, it can be used for the most basic (tiny) system and beyond medical-grade robotics systems.
| Copyright 2021-2026 Xeno Innovations, Inc. (DBA: Suess Labs) |
| Created by: Damian Suess |
| Date: 2021-06-07 (inception 2016) |
| Package | Stable | Preview |
|---|---|---|
| Lite.StateMachine |  |
 |
Create a state machine by defining the states, transitions, and shared context.
You can define the state machine using either the fluent design pattern or standard line-by-line. Each state is represented by a enum StateId in the following example.
// That's it! Just create the state machine, register states, and run it.
var machine = await new StateMachine<StateId>()
.RegisterState<BasicState1>(StateId.State1, StateId.State2)
.RegisterState<BasicState2>(StateId.State2, StateId.State3)
.RegisterState<BasicState3>(StateId.State3)
.RunAsync(StateId.State1);
// To avoid hung states, you can pass in a timeout value (in milliseconds)
// Useful for robotic systems; fail fast and recover!
var machine = new StateMachine<BasicStateId>();
machine.DefaultStateTimeoutMs = 3000;Define States:
// Optional Wrapper
public class BaseState : IState<StateId>
{
public virtual Task OnEntering(Context<StateId> context) => Task.CompletedTask;
public virtual Task OnEnter(Context<StateId> context) => Task.CompletedTask;
public virtual Task OnExit(Context<StateId> context) => Task.CompletedTask;
}
public class BasicState1() : BaseState
{
public async Task OnEnter(Context<BasicStateId> context)
{
await Task.Yield(); // Some async work here...
context.NextState(Result.Ok);
}
}
public class BasicState2() : BaseState
{
public Task OnEnter(Context<StateId> context)
{
context.NextState(Result.Ok);
return Task.CompletedTask; // Notice, we did not async/await this method
}
}
public class BasicState3() : BaseState
{
public Task OnEnter(Context<StateId> context)
{
context.NextState(Result.Ok);
return Task.CompletedTask;
}
}var uml = machine.ExportUml(includeSubmachines: true);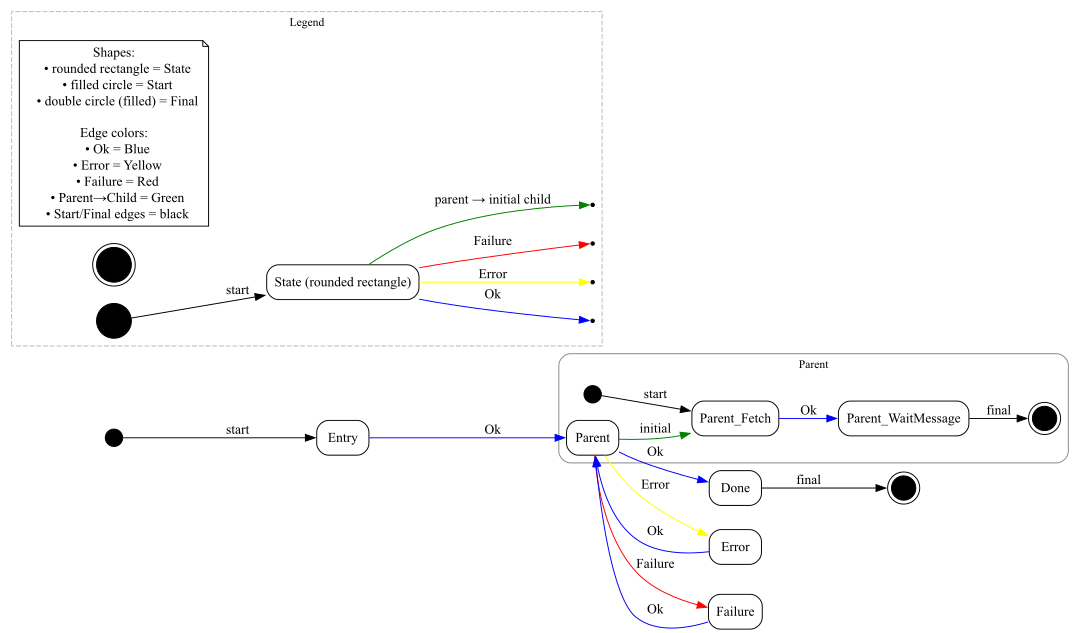
using Lite.StateMachine;
// Note the use of generics '<TStateClass>' to strongly-type the state machine
var machine = new StateMachine<CompositeL1StateId>()
.AddContext(new() { { ParameterType.Counter, 999 } });
.RegisterState<Composite_State1>(CompositeL1StateId.State1, CompositeL1StateId.State2)
.RegisterComposite<Composite_State2>(
stateId: CompositeL1StateId.State2,
initialChildStateId: CompositeL1StateId.State2_Sub1,
onSuccess: CompositeL1StateId.State3)
.RegisterSubState<Composite_State2_Sub1>(
stateId: CompositeL1StateId.State2_Sub1,
parentStateId: CompositeL1StateId.State2,
onSuccess: CompositeL1StateId.State2_Sub2)
.RegisterSubState<Composite_State2_Sub2>(
stateId: CompositeL1StateId.State2_Sub2,
parentStateId: CompositeL1StateId.State2,
onSuccess: null) // NULL denotes returning to parent state on success
.RegisterState<Composite_State3>(CompositeL1StateId.State3);
// Optional, pass in starting Context Property
await machine.RunAsync(CompositeL1StateId.State1, ctxProperties);States are represented by classes that implement the IState interface.
public class Composite_State1() : BaseState
{
public override Task OnEnter(Context<CompositeL1StateId> context)
{
var cnt = context.ParameterAsInt(ParameterType.Counter);
var blank = context.ParameterAsBool(ParameterType.DummyBool);
context.NextState(Result.Ok);
return Task.CompletedTask;
}
}
public class Composite_State2() : BaseState
{
public override Task OnEnter(Context<CompositeL1StateId> context)
{
// Signify we're ready to go to sub-states
context.NextState(Result.Ok);
return Task.CompletedTask;
}
public override Task OnExit(Context<CompositeL1StateId> context)
{
// Signify we're ready to go to next state after composite
context.NextState(Result.Ok);
return Task.CompletedTask;
}
}
public class Composite_State2_Sub1() : BaseState
{
public override Task OnEnter(Context<CompositeL1StateId> context)
{
// Safely add/update key-value in Context
context.Parameters.SafeAdd("StringBasedParamKey", SUCCESS);
context.NextState(Result.Ok);
return Task.CompletedTask;
}
}
public class Composite_State2_Sub2() : BaseState
{
public override Task OnEnter(Context<CompositeL1StateId> context)
{
context.NextState(Result.Ok);
return Task.CompletedTask;
}
}
public class Composite_State3() : BaseState
{
public override Task OnEnter(Context<CompositeL1StateId> context)
{
context.NextState(Result.Ok);
return Task.CompletedTask;
}
}- AOT Friendly - No Reflection, no Linq, etc.
- Passing parameters between state transitions via
Context - Types of States
- Basic Linear State (
BaseState) - Composite States (
CompositeState)- Hieratical / Nested Sub-states
- Similar to Actor/Director model
- Command States with optional Timeout (
CommandState)- Uses internal Event Aggregator for sending/receiving messages
- Allows users to hook to external messaging services (TCP/IP, RabbitMQ, DBus, etc.)
- Basic Linear State (
- State Transition Triggers
- Transitions are triggered by setting the context's next state result:
- On Success:
context.NextState(Result.Ok); - On Error:
context.NextState(Result.Error); - On Failure: :
context.NextState(Result.Failure);
- State Handlers
OnEntering- Initial entry of the stateOnEnter- Resting (idle) place for state.OnExit- (Optional) Thrown during transitioning. Used for housekeeping or exiting activity.OnMessage(Optional)- Must ensure that code has exited
OnMessagebefore going to the next state.
- Must ensure that code has exited
OnTimeout- (Optional) Thrown when the state is auto-transitioning due to timeout exceeded
- Transition has knowledge of the
PreviousStateandNextState