A complete autonomous driving stack for RC-scale vehicles featuring real-time cone-based lane keeping, ToF-based obstacle avoidance, and a comprehensive software-in-the-loop simulation environment.
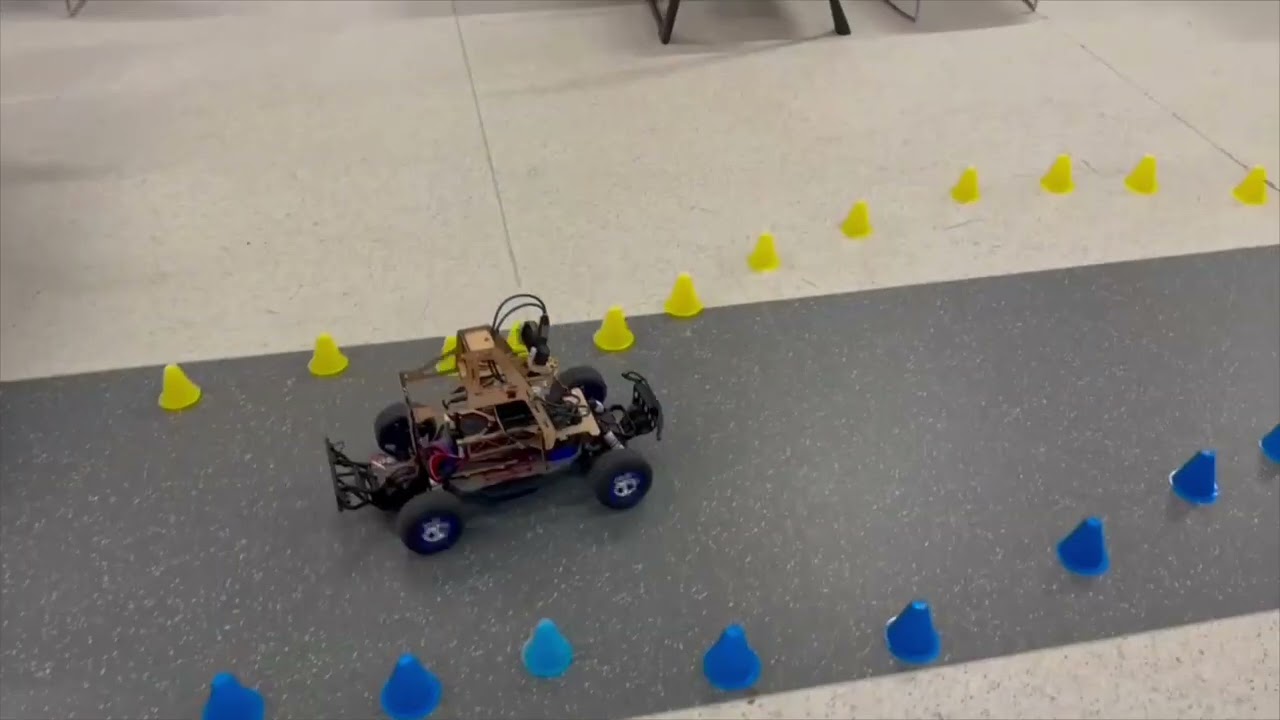
Click the image above to watch the RC car navigating different scenarios
- Overview
- Key Features
- System Architecture
- Hardware Platform
- Sensor Suite
- Control Policies
- Simulation Framework
- Getting Started
- Usage
- Project Structure
- Contributing
- License
- Acknowledgments
This project implements a complete autonomous driving system for a Traxxas RC car platform, developed as part of the AI for Robotics (ELEN90095) course. The system combines:
- Real-time perception using YOLOv8-based cone detection and VL53L5CX Time-of-Flight sensors
- Intelligent control policies for lane-keeping and obstacle avoidance with PD controllers
- Software-in-the-loop simulation that mirrors real hardware for rapid policy development
- Production-ready deployment with Docker containerization and web-based monitoring
The vehicle successfully navigates cone-defined tracks while dynamically avoiding obstacles, demonstrating the integration of computer vision, sensor fusion, and real-time control.
| Feature | Description |
|---|---|
| Cone-Based Lane Keeping | Linear regression on detected yellow/blue cones with proportional steering control |
| Obstacle Avoidance | Multi-zone ToF sensing with velocity-aware PD controller and emergency braking |
| Gap Navigation | Intelligent maneuvering around obstacles when sufficient clearance exists |
| Sensor Fusion | Integration of camera, ToF, IMU, LiDAR, and wheel encoder data |
| Simulation Environment | Complete SIL testing with realistic sensor noise models |
| Batch Testing | Automated regression testing across multiple track scenarios |
| Web Interface | Real-time monitoring and control via browser-based dashboard |
| Docker Deployment | Containerized environment for reproducible builds |
┌─────────────────────────────────────────────────────────────────────────┐
│ PERCEPTION LAYER │
├─────────────────┬─────────────────┬─────────────────┬───────────────────┤
│ OAK-D Camera │ VL53L5CX ToF │ BNO08x IMU │ RPLiDAR A1 │
│ (YOLOv8) │ (4x4 Array) │ (9-DOF) │ (360°) │
│ 30 Hz │ 20 Hz │ 400 Hz │ 10 Hz │
└────────┬────────┴────────┬────────┴────────┬────────┴─────────┬─────────┘
│ │ │ │
▼ ▼ ▼ ▼
┌─────────────────────────────────────────────────────────────────────────┐
│ ROS2 MESSAGE LAYER │
│ /cone_points /tof_sensor /imu_sensor /scan /wheel_speed │
└─────────────────────────────────┬───────────────────────────────────────┘
│
▼
┌─────────────────────────────────────────────────────────────────────────┐
│ POLICY NODE │
│ ┌─────────────────┐ ┌─────────────────┐ ┌─────────────────┐ │
│ │ Lane Keeping │ │ Obstacle │ │ Gap Navigation │ │
│ │ (Cone Fitting) │ │ Avoidance │ │ (Maneuvering) │ │
│ │ │ │ (PD Control) │ │ │ │
│ └────────┬────────┘ └────────┬────────┘ └────────┬────────┘ │
│ └────────────────────┼────────────────────┘ │
│ ▼ │
│ FSM State Machine │
│ (IDLE → ZERO → POLICY_ACTIVE) │
└─────────────────────────────────┬───────────────────────────────────────┘
│
▼
┌─────────────────────────────────────────────────────────────────────────┐
│ ACTUATION LAYER │
│ /esc_and_steering_set_point_percent_action │
├─────────────────────────────────┬───────────────────────────────────────┤
│ ESC Motor │ Steering Servo │
│ [-100%, +100%] │ [-100%, +100%] │
└─────────────────────────────────┴───────────────────────────────────────┘
- Platform: Traxxas RC Car (1:10 scale)
- Wheelbase: 287mm
- Track Width: 235mm
- Max Speed: ~3.0 m/s
- Steering Angle: ±30°
| Component | Role |
|---|---|
| Raspberry Pi 4 | Main compute, ROS2 nodes |
| RP2040 Pico #1 | IMU interface (BNO08x) |
| RP2040 Pico #2 | Encoder & RC switch monitoring |
- AI4R-PIHAT: Raspberry Pi HAT for sensor/actuator routing
- AI4R-SENSORPCB: Centralized sensor breakout board
| Sensor | Model | Purpose | Key Specs |
|---|---|---|---|
| Camera | OAK-D | Cone detection (YOLOv8) | 120° FOV, 30 Hz, 0.5-10m range |
| ToF Array | VL53L5CX | Obstacle detection | 4×4 zones, 45° FOV, 20 Hz, ±5mm accuracy |
| IMU | BNO08x | Orientation & acceleration | 9-DOF, 400 Hz, auto-calibration |
| LiDAR | RPLiDAR A1 | Environment mapping | 360°, 10 Hz, 0.15-12m range |
| Encoder | Hall Effect | Speed estimation | 16.32 ticks/rev, period-based |
The lane-keeping system uses computer vision to detect yellow (left) and blue (right) cones, fitting linear trajectories to determine the road centerline.
# Simplified lane-keeping logic
if yellow_cones and blue_cones:
centerline = (yellow_fit + blue_fit) / 2
elif yellow_cones:
centerline = yellow_fit - ROAD_WIDTH/2
elif blue_cones:
centerline = blue_fit + ROAD_WIDTH/2
lateral_error = evaluate_centerline(look_ahead_distance)
steering = -Kp * lateral_errorKey Parameters:
ROAD_WIDTH: 1000mmLOOK_AHEAD_DISTANCE: 1000mmKp_STEER: 80.0
A velocity-aware PD controller monitors the ToF sensor array for obstacles, implementing graduated braking and emergency stop capabilities.
┌─────────────────────────────────────────────────────────┐
│ ToF 4×4 Grid │
│ ┌───┬───┬───┬───┐ │
│ │ 0 │ 1 │ 2 │ 3 │ ← Zones 4-11 used for detection │
│ ├───┼───┼───┼───┤ │
│ │ 4 │ 5 │ 6 │ 7 │ ← Center zones for forward sensing │
│ ├───┼───┼───┼───┤ │
│ │ 8 │ 9 │10 │11 │ ← Center zones for forward sensing │
│ ├───┼───┼───┼───┤ │
│ │12 │13 │14 │15 │ │
│ └───┴───┴───┴───┘ │
└─────────────────────────────────────────────────────────┘
Control Strategy:
- P (Proportional): Responds to distance error from target
- D (Derivative): Responds to rate of approach
- Emergency Override: Hard brake if distance < 0.8m
Key Parameters:
BASE_TARGET_DISTANCE: 1.2mEMERGENCY_BRAKE_DISTANCE: 0.8mKp_OBSTACLE: 80.0Kd_OBSTACLE: 40.0
When an obstacle is detected but sufficient clearance exists on one side, the system calculates navigable gaps and steers around the obstacle.
# Gap calculation
gap_on_left = |obstacle_y - yellow_cones_y| - obstacle_width/2
gap_on_right = |obstacle_y - blue_cones_y| - obstacle_width/2
if max(gap_on_left, gap_on_right) >= MIN_GAP_WIDTH:
steer_toward_larger_gap()
else:
apply_pd_braking()Key Parameters:
MIN_GAP_WIDTH: 0.35mMANEUVER_DISTANCE_THRESHOLD: 1.6mSTEERING_BIAS_GAIN: 80.0
The project includes a comprehensive Software-in-the-Loop (SIL) simulation environment that publishes identical ROS2 topics as the real hardware, enabling rapid policy development and testing.
- Identical Interface: Same topics and message types as hardware
- Realistic Sensor Models: Gaussian noise, dropout, detection probability
- Vehicle Dynamics: Bicycle model with tire slip and motor lag
- Performance Metrics: Automatic scoring and analysis
- Batch Testing: Run multiple scenarios automatically
- Video Recording: Auto-generated MP4 visualizations
| Scenario | Description |
|---|---|
simple_straight.yaml |
Baseline straight track |
s_curve.yaml |
Two connected curves (20m) |
s_curve_tight.yaml |
Tighter radius curves |
obstacle_course.yaml |
Multiple obstacles |
obstacle_goldilocks.yaml |
Single obstacle at optimal detection distance |
obstacle_immediate_wall.yaml |
Emergency braking test |
real_track_oct14.yaml |
Real measured track layout |
# Single scenario test
ros2 launch ai4r_pkg quick_test.launch.py \
scenario:=obstacle_goldilocks \
real_time_factor:=5.0
# Batch testing
ros2 run ai4r_pkg batch_tester.py \
test/scenarios/tracks/ \
--filter "obstacle" \
--timeout 120Results are saved to sim_results/ including JSON logs, performance plots, and MP4 recordings.
- Ubuntu 22.04 LTS
- ROS2 Humble
- Python 3.10+
- Docker (optional, for containerized deployment)
git clone https://github.com/yourusername/Autonomous-RC-Car-AI-Project.git
cd Autonomous-RC-Car-AI-ProjectFollow the official ROS2 installation guide.
cd ros2_ws
# Source ROS2
source /opt/ros/humble/setup.bash
# Install dependencies
sudo rosdep init # Only needed once
rosdep update
rosdep install -i --from-path src --rosdistro humble -y
# Build
colcon build
# Source the workspace
source install/setup.bashcd mcu_ws/build
cmake .. && make
# Outputs: ai4r-sensors-rp1.uf2, ai4r-sensors-rp2.uf2cd docker
docker-compose up -d
# Access web interface at http://localhost:8080For the sensor PCB parser node to work, grant read/write access to the serial ports:
echo 'KERNEL=="ttyACM0", MODE="0666"' | sudo tee /etc/udev/rules.d/ttyACM0.rules
echo 'KERNEL=="ttyACM1", MODE="0666"' | sudo tee /etc/udev/rules.d/ttyACM1.rules
sudo udevadm control --reload-rules
sudo udevadm triggerros2 launch ai4r_pkg ai4r_bringup_launch.py# Vehicle control only
ros2 launch ai4r_pkg traxxas_launch.py
# Sensors + cone detection
ros2 launch ai4r_pkg traxxas_imu_tof_cone_detector_launch.py
# Policy node only
ros2 launch ai4r_pkg policy_launch.py
# Camera streaming
ros2 launch ai4r_pkg camera_stream_launch.pyros2 run ai4r_pkg keyboard_teleop.py# List all topics
ros2 topic list
# View cone detections
ros2 topic echo /cone_points
# View ToF data
ros2 topic echo /tof_sensor_vl53l5cx
# Check topic frequency
ros2 topic hz /cone_pointsros2 bag record /cone_points /tof_sensor_vl53l5cx /imu_sensor /wheel_speed_m_per_secAutonomous-RC-Car-AI-Project/
├── ros2_ws/ # Main ROS2 workspace
│ └── src/
│ ├── ai4r_pkg/ # Core package
│ │ ├── scripts/ # Python nodes
│ │ │ ├── policy_node.py # Main control policy
│ │ │ ├── cone_detector_node.py
│ │ │ └── models/ # YOLOv8 models
│ │ ├── src/ # C++ nodes
│ │ ├── launch/ # Launch files
│ │ ├── config/ # Parameter files
│ │ ├── drivers/ # Hardware drivers
│ │ └── test/
│ │ ├── simulation/ # SIL framework
│ │ └── scenarios/ # Test tracks (YAML)
│ └── ai4r_interfaces/ # Custom messages
│
├── mcu_ws/ # RP2040 Pico firmware
│ ├── ai4r-sensors-rp1.cpp # IMU interface
│ ├── ai4r-sensors-rp2.cpp # Encoder/RC switch
│ └── [libraries]/ # BNO08x, VL53L5CX, servo
│
├── docker/ # Docker configuration
├── web_interface/ # Browser-based dashboard
├── pcb_files/ # KiCAD PCB designs
├── sim_results/ # Simulation outputs
├── real_runs/ # Hardware run recordings
├── SIMULATION_ARCHITECTURE.md # Detailed simulation docs
└── README.md # This file
cd /path/to/repository
sudo chmod 777 -R .- Check I2C connection:
i2cdetect -y 1 - Verify power supply (3.3V)
- Check sensor address conflicts
- Verify OAK-D is connected:
lsusb | grep Movidius - Install DepthAI:
pip install depthai - Check permissions:
sudo usermod -aG video $USER
Contributions are welcome! Please follow these steps:
- Fork the repository
- Create a feature branch (
git checkout -b feature/amazing-feature) - Commit your changes (
git commit -m 'Add amazing feature') - Push to the branch (
git push origin feature/amazing-feature) - Open a Pull Request
This project is licensed under the MIT License - see the LICENSE.txt file for details.
- Course: AI for Robotics (ELEN90095)
- Institution: University of Melbourne
- Platform: Traxxas RC Car
- Frameworks: ROS2 Humble, YOLOv8, Pico SDK
- Libraries: BNO08x, VL53L5CX, DepthAI
Built with ROS2 and Python